הפעלה/כיבוי מצביע לבן גדול
הפעלה/כיבוי מצביע לבן גדול הפעלה/כיבוי מצביע לבן שחור
הפעלה/כיבוי מצביע לבן שחור









- הופעה, סדנאות וסיורים מיוחדים לחג. הזמינו כרטיסים מראש
- תערוכה מקורית שלוקחת את הצופה למסע סוריאליסטי לגבולות שבין הידע לדמיון. הזדמנות אחרונה לראות.
- שיר חדש על סיפורו של ד"ר מנחם גורן ואיך הציל מין מהכחדה
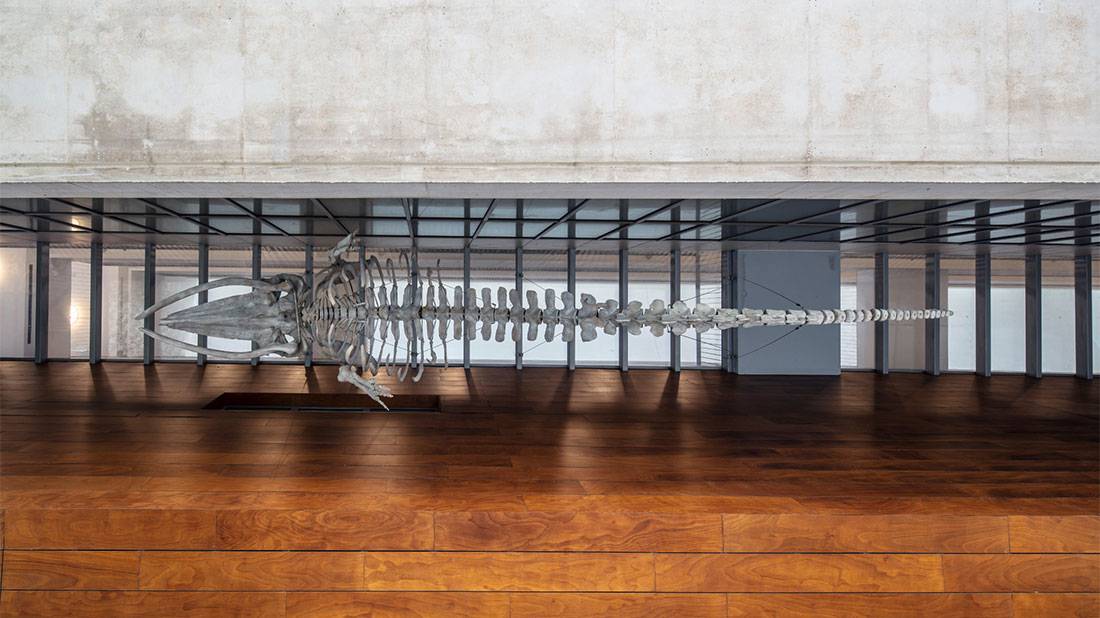
- המוזיאון מציע מיליוני פריטי אוסף המתעדים את עולם החי והצומח של האזור במהלך מאה השנים האחרונות, כמו גם את ההתפתחות וההיסטוריה של המין האנושי.
אירועים

 ד׳ | 24 באפריל | 17:00ד׳ | 24 באפריל | 17:00
ד׳ | 24 באפריל | 17:00ד׳ | 24 באפריל | 17:00אגדה חיה בהופעה חיה | כרטיסים אחרונים
כולל שירים חדשים מהאלבום #2 | פסח 2024
כל הפרטים- 29-23 באפריל | 10:30; 12:3029-23 באפריל | 10:30; 12:30
סדנת חקרטבע משפחתית
כל יום בחופשת הפסח, בשעות 10:30 וב-12:30 | פעילות משותפת של מבוגרים וילדים מגיל 6 ומעלה | בשילוב כניסה למוזיאון
כל הפרטים - 20-29 באפריל20-29 באפריל
סיורים מודרכים בגן הבוטני | בעקבות יציאת מצרים
בשעות 9:45 ו-11:30 הכרטיס משולב עם כניסה למוזיאון. בשעה 17:00 ללא כניסה למוזיאון (למעט יום שישי וערב חג).
כל הפרטים - ה׳ | 2 במאי | 19:30ה׳ | 2 במאי | 19:30
נעילת התערוכה HERE BE DRAGONS של נבט יצחק
אירוע לילי בשיתוף "דבק" | דרינק ראשון חינם!
כל הפרטים